Vysvětlení pulzní šířkové modulace (PWM).
Pulse Width Modulation (PWM) je jednoduchý a účinný způsob, jak můžete ovládat elektrickou energii pomocí digitálních signálů.Místo změny napájecího napětí upravíte, jak dlouho signál zůstane zapnutý a vypnutý v rámci každého cyklu, abyste řídili dodávku energie.Tento článek vám pomůže pochopit, jak PWM funguje, jak pracovní cyklus ovlivňuje výstup a proč se PWM široce používá v elektronice a řídicích systémech.Uvidíte také, jak se PWM používá v ovladačích, typech křivek a aplikacích.Katalog
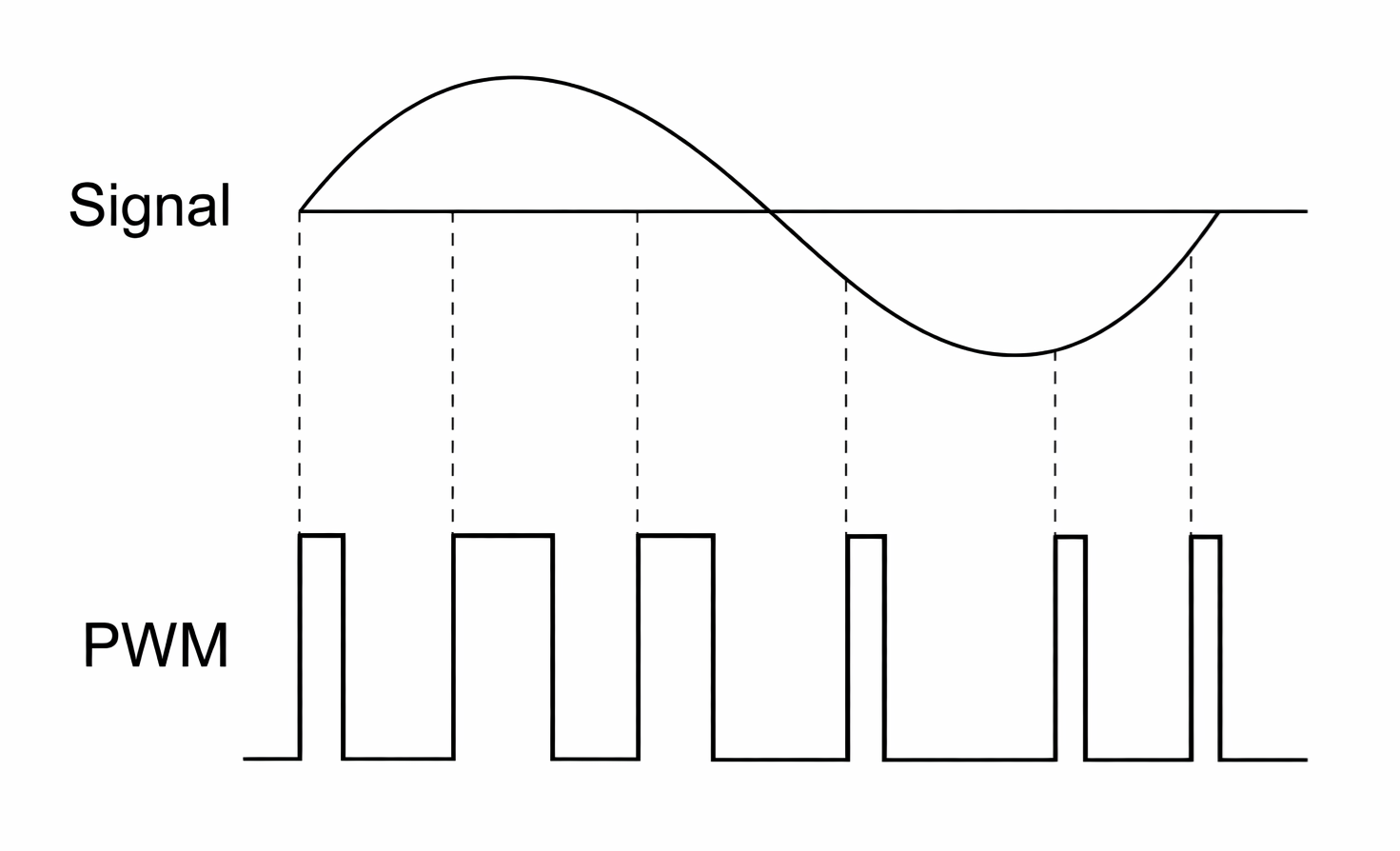
Obrázek 1. Koncepce pulzně šířkové modulace
Co je modulace šířky pulzu?
Pulse Width Modulation (PWM) je digitální řídicí technika používaná k regulaci elektrické energie dodávané do zátěže změnou podílu doby zapnutí v rámci pevné spínací periody.Namísto změny úrovně napájecího napětí PWM řídí efektivní výkon rychlým přepínáním signálu mezi stavy zcela ZAPNUTO a zcela VYPNUTO.Tento přístup umožňuje účinnou regulaci výkonu s minimálními energetickými ztrátami, díky čemuž se PWM široce používá v motorových pohonech, řízení LED, výkonových měničích a vestavěných řídicích systémech.
Jak funguje modulace šířky pulzu?

Obrázek 2. Pracovní princip PWM
Pulse Width Modulation funguje opakovaným zapínáním a vypínáním výstupního signálu na konstantní frekvenci.Během každého spínacího cyklu zůstává signál zapnutý po určitou dobu a vypnutý po zbytek cyklu.Poměr doby zapnutí k celkové době cyklu je známý jako pracovní cyklus a přímo určuje průměrné napětí a proud dodávaný zátěži.Vyšší pracovní cyklus zvyšuje dodávaný výkon, zatímco nižší pracovní cyklus jej snižuje.
Protože spínací frekvence je obvykle mnohem vyšší než elektrická nebo mechanická odezva zátěže, zátěž reaguje spíše na průměrnou hodnotu signálu než na jednotlivé impulsy.Výsledkem je, že PWM umožňuje plynulé a přesné řízení výkonu pomocí digitálních signálů bez potřeby proměnných zdrojů napětí.
Charakteristiky průběhu signálu PWM
|
PWM
Charakteristický |
Popis |
|
Šířka pulzu |
ON čas
v rámci jednoho cyklu PWM, od 0 mikrosekund do celé periody. |
|
Pracovní cyklus |
Procento
Doba zapnutí za cyklus, od 0 procent do 100 procent. |
|
Frekvence PWM |
Počet
cyklů za sekundu, běžně 500 Hz až 100 kHz. |
|
Období PWM |
Celkový cyklus
čas, obvykle 1 milisekundu až 10 mikrosekund. |
|
Signál
Amplituda |
Úroveň napětí
signálu PWM, obvykle 3,3 V, 5 V nebo 12 V. |
|
Vysoké napětí
úroveň |
Napětí
ve stavu ON, rovné napájecímu napětí. |
|
Nízké napětí
úroveň |
Napětí
během stavu OFF, typicky 0 V. |
|
Čas vzestupu |
Čas na to
přepnout z nízké na vysokou, často 10 ns až 1 µs. |
|
Podzimní čas |
Čas na to
přepnout z vysoké na nízkou, často 10 ns až 1 µs. |
|
Přepínání
Rychlost |
Maximální sazba
změny stavu, podporující vysokofrekvenční PWM. |
|
Rozlišení |
Počet
pracovní kroky, běžně 8bitové nebo 10bitové. |
|
Signál
Stabilita |
Důslednost
frekvence a pracovního cyklu v průběhu času. |
|
Jitter |
Malé načasování
odchylka, obvykle menší než 1 procento. |
|
Mrtvý čas |
Záměrně
zpoždění mezi přepnutím, typicky 100 ns až 5 µs. |
|
Harmonické |
Vysokofrekvenční
komponenty generované rychlým spínáním. |
|
Ovládání napájení |
Výstupní výkon
se mění lineárně s pracovním cyklem. |
|
Odezva na zatížení |
Schopnost
udržovat tvar vlny při změnách zatížení. |
|
Filtrování
Výstup |
Filtrované PWM
vytváří plynulé stejnosměrné napětí. |
|
Hluk
Imunita |
Odolnost vůči
interference se zlepšuje s čistými okraji. |
Typy pulzně šířkové modulace
Pulse Width Modulation lze rozdělit do různých řídicích strategií podle toho, jak je tvar výstupní vlny tvarován.Tyto typy PWM se zaměřují na modulační koncepty a řídicí algoritmy, které ovlivňují výstupní napětí, harmonický výkon a účinnost.
Modulace šířky jedním impulsem (PWM s jedním impulsem)

Obrázek 3. Jednopulzní PWM křivka
Single-Pulse PWM využívá jeden spínací impuls na půl cyklu výstupního průběhu.Šířka tohoto jediného pulsu je upravena pro řízení úrovně výstupního napětí.Protože za půl cyklu dojde pouze k jedné spínací události, zůstávají spínací ztráty nízké.Tato strategie řízení však vytváří vyšší harmonické zkreslení a používá se hlavně v nízkofrekvenčních a základních aplikacích pro řízení výkonu, kde má jednoduchost přednost před kvalitou tvaru vlny.
Modulace šířky více pulzů (PWM s více pulzy)

Obrázek 4. Vícepulzní PWM křivka
Multiple-Pulse PWM rozděluje každý půlcyklus na několik menších pulzů namísto jednoho velkého pulzu.Zvýšením počtu pulzů se harmonická energie šíří směrem k vyšším frekvencím, čímž se zlepšuje kvalita výstupního tvaru vlny.Tento typ PWM nabízí rovnováhu mezi sníženým harmonickým zkreslením a zvládnutelnými spínacími ztrátami, takže je vhodný pro průmyslové měniče energie a systémy motorových pohonů.
Sinusová pulzní šířková modulace (SPWM)

Obrázek 5. Generování sinusového PWM
Sinusová PWM je modulační strategie, která generuje impulsy na základě sinusového referenčního signálu.Šířky impulsů se mění podle okamžité amplitudy referenčního průběhu, což umožňuje výstupu aproximovat sinusovou vlnu po filtraci.SPWM je široce používán v invertorech, motorových pohonech a systémech obnovitelné energie, protože poskytuje dobrý harmonický výkon s mírnou složitostí řízení.
Space Vector Pulse Width Modulation (SVPWM)
Space Vector PWM je pokročilá řídicí strategie, která využívá matematický vektorový model měniče spíše než přímé porovnání průběhu.Vybírá optimální spínací stavy pro aproximaci rotujícího referenčního vektoru v napěťovém prostoru.Ve srovnání s SPWM zlepšuje SVPWM využití napětí stejnosměrné sběrnice a dále snižuje harmonické zkreslení, takže je vhodné pro vysoce výkonné motorové pohony a přesné průmyslové řídicí systémy.
Metody generování PWM
Signály PWM lze také kategorizovat podle toho, jak jsou impulsy generovány a zarovnány v hardwaru.Tyto metody generování PWM se zaměřují na činnost časovače, symetrii přepínání a umístění impulsů, spíše než na samotnou strategii modulace.
Single-Edge PWM (Edge-Aligned PWM)

Obrázek 6. Edge-Aligned PWM Timing
Single-Edge PWM zarovná všechny impulsy k jedné hraně spínací periody, obvykle k náběžné hraně.Pracovní cyklus se nastavuje prodloužením nebo zkrácením pulzu z této pevné hrany.Tato metoda generování je jednoduchá na implementaci pomocí hardwarových časovačů a komparátorů, ale její asymetrický spínací vzor může zvýšit harmonické zkreslení a elektromagnetické rušení.
Double-Edge PWM (PWM zarovnané na střed)

Obrázek 7. Center-Aligned PWM Timing
Double-Edge PWM vystředí puls během spínací periody zapínáním a vypínáním symetricky kolem středního bodu.Toto symetrické časování snižuje harmonické zkreslení a elektromagnetické rušení a zároveň zlepšuje rovnováhu proudu.Kvůli těmto výhodám se středově zarovnaná PWM běžně používá v přesných motorových pohonech a vysoce výkonných aplikacích pro řízení výkonu.
Carrier-Based PWM (Comparator PWM)
Carrier-Based PWM generuje impulsy porovnáním referenčního signálu s vysokofrekvenční nosnou vlnou pomocí komparátoru.Když reference překročí nosnou, výstup sepne.Tato metoda slouží jako základ pro generování hardwaru pro mnoho strategií řízení PWM, včetně SPWM, a je široce implementována v mikrokontrolérech, DSP a průmyslových kontrolérech.
PWM v mikrokontrolérech a kontrolérech
Pulse Width Modulation v Arduinu

Obrázek 8. Arduino PWM LED Control
Arduino generuje Pulse Width Modulation pomocí interních hardwarových časovačů, které přepínají výstupní pin mezi stavy HIGH a LOW.Pracovní cyklus se nastavuje pomocí softwaru, který přímo řídí průměrné napětí dodávané do zátěže.Změnou pracovního cyklu může Arduino plynule měnit jas LED nebo rychlost motoru bez změny napájecího napětí.Frekvence PWM je obvykle pevně dána nastavením časovače, což zajišťuje stabilní provoz během řídicích úloh.Jak je znázorněno na obrázku, pin Arduino PWM řídí LED přes odpor, což jasně ukazuje, jak změna pracovního cyklu mění viditelný jas.
Pulse Width Modulation v ESP32
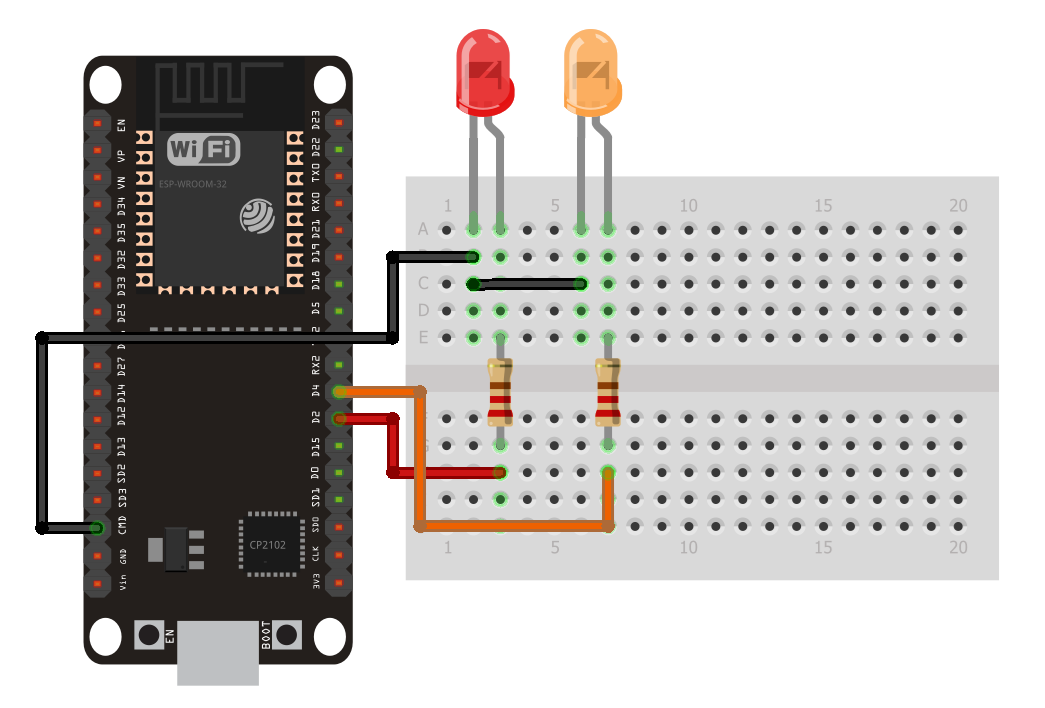
Obrázek 9. Příklad výstupu ESP32 PWM
ESP32 poskytuje pokročilou modulaci šířky pulzu pomocí vyhrazených hardwarových modulů PWM.Podporuje vyšší rozlišení, více nezávislých PWM kanálů a flexibilní řízení frekvence bez zatížení CPU.To umožňuje přesné a citlivé řízení výkonu pro motory, LED diody a zařízení internetu věcí.ESP32 PWM je vhodný zejména pro aplikace, které vyžadují rychlou odezvu a přesnou regulaci výkonu.Obrázek 9 ukazuje ESP32 ovládající více LED diod s různými pracovními cykly PWM, ilustrující, jak každý kanál nezávisle upravuje výstupní výkon.
Pulse Width Modulation v PLC

Obrázek 10. Řízení ohřívače PLC PWM
PLC využívají modulaci šířky pulzu k řízení průmyslových zátěží, jako jsou ohřívače, motory a akční členy, s vysokou spolehlivostí.Výstup PWM se nastavuje na základě zpětné vazby snímače nebo naprogramované řídicí logiky pro přesnou regulaci výkonu.Tato metoda umožňuje plynulé ovládání při minimalizaci elektrického namáhání spínacích zařízení.PWM na bázi PLC je navrženo tak, aby spolehlivě fungovalo v elektricky hlučném a drsném průmyslovém prostředí.Jak je znázorněno na obrázku, PLC používá signál PWM k ovládání polovodičového relé, které řídí výkon ohřívače na základě teplotní zpětné vazby.
Aplikace pulzně šířkové modulace
Pulse Width Modulation se široce používá k efektivnímu a přesnému řízení výkonu v elektronických aplikacích s nízkým i vysokým výkonem.
1. Řízení otáček motoru
PWM se běžně používá u stejnosměrných motorů, servomotorů a motorových pohonů BLDC k řízení rychlosti a točivého momentu změnou průměrného napětí dodávaného do motoru.Tato metoda poskytuje plynulé řízení rychlosti a vysokou účinnost v robotice, průmyslové automatizaci a elektrických vozidlech.
2. LED stmívání a ovládání osvětlení
V ovladačích LED ovládá PWM jas rychlým zapínáním a vypínáním LED při udržování konstantní úrovně proudu.To zabraňuje posunu barev, zlepšuje účinnost a umožňuje přesné nastavení jasu v displejích, automobilovém osvětlení a inteligentních osvětlovacích systémech.
3. Napájecí zdroje a regulace napětí
PWM je základní technika ve spínaných napájecích zdrojích, DC-DC konvertorech a invertorech.Pomáhá efektivně regulovat výstupní napětí a proud a snižuje tvorbu tepla ve srovnání s lineárními regulátory.
4. Generování zvukového signálu
PWM se používá v audio zesilovačích třídy D k převodu audio signálů na vysokofrekvenční spínací signály.To umožňuje vysoce výkonné zesílení zvuku s nízkou ztrátou výkonu a kompaktním obvodem.
5. Řízení vytápění a teploty
PWM řídí výkon dodávaný do ohřívačů, topných těles a systémů regulace teploty úpravou doby zapnutí a vypnutí napájení.To zajišťuje stabilní regulaci teploty v průmyslových ohřívačích, pájecích stanicích a domácích spotřebičích.
6. Nabíjení baterie a správa energie
PWM se používá v nabíječkách baterií a solárních regulátorech nabíjení pro řízení nabíjecího proudu a napětí.To zlepšuje účinnost nabíjení, chrání baterie před přebíjením a prodlužuje životnost baterie.
7. Mikrokontroléry a vestavěné systémy
Výstupy PWM z mikrokontrolérů jsou široce používány pro generování analogových signálů, ovládání akčních členů a rozhraní s externími zařízeními.Díky tomu je PWM důležitý ve vestavěných systémech, zařízeních IoT a řídicích aplikacích.
PWM vs lineární řízení vs řízení fázového úhlu
|
Parametr |
PWM
Ovládání |
Lineární
Ovládání |
Fáze
Ovládání úhlu |
|
Základní ovládání
Metoda
|
Výstup je
řízena měnícím se pracovním cyklem |
Výstup je
řízeno lineárním poklesem napětí |
Výstup je
řízena zpožděným vedením střídavého tvaru vlny |
|
Typická nabídka
Typ |
DC napájení
zásobování |
DC napájení
zásobování |
Napájení střídavým proudem
zásobování |
|
Řídicí signál
Frekvence |
Běžně 1
kHz až 100 kHz |
nula
spínací frekvence |
Linka
frekvence 50 Hz nebo 60 Hz |
|
Energetická účinnost |
Účinnost
obvykle 85 až 98 procent |
Účinnost
obvykle 30 až 60 procent |
Účinnost
obvykle 70 až 90 procent |
|
Generování tepla |
Tepelná ztráta je
nízká kvůli spínacímu provozu |
Tepelná ztráta je
vysoká kvůli poklesu napětí |
Tepelná ztráta je
mírné při částečném vedení |
|
Výstupní napětí
nařízení |
Průměrný
napětí je řízeno pracovním cyklem |
Výstup
napětí přímo následuje řídicí vstup |
RMS napětí
se mění s úhlem střelby |
|
Rozlišení kontroly |
Vysoká
rozlišení s digitálními časovači |
Velmi vysoká
rozlišení s analogovým ovládáním |
Střední
rozlišení omezené střídavým průběhem |
|
Složitost obvodu |
Střední
složitost se spínacími součástmi |
Jednoduché
obvod s propustným prvkem |
Střední
složitost pomocí TRIAC nebo SCR |
|
EMI a hluk
úroveň |
EMI je
střední až vysoká bez filtrování |
EMI je velmi
nízká |
EMI je vysoké
kvůli zkreslení tvaru vlny |
|
Typické přepínání
Zařízení |
MOSFET nebo
IGBT |
BJT nebo lineární
regulátor |
TRIAC nebo SCR |
|
Rychlost odezvy |
Doba odezvy
je v mikrosekundách |
Doba odezvy
je v milisekundách |
Doba odezvy
závisí na přechodu AC nulou |
|
Kompatibilita zatížení |
Nejlepší pro
LED diody motorů a výkonové měniče |
Nejlepší pro nízké
napájení analogových zátěží |
Nejlepší pro
ohřívače žárovek a střídavé motory |
|
Rozsah jmenovitého výkonu |
Od 1 wattu
na několik kilowattů |
Obvykle níže
50 wattů |
Běžně od
100 wattů až několik kilowattů |
|
Přesnost ovládání |
Přesnost
záleží na rozlišení časovače |
Velmi přesné
a plynulé ovládání |
Přesnost
ovlivněna kolísáním síťového napětí |
|
Běžné aplikace |
Rychlost motoru
ovládání SMPS LED stmívání |
Zvuk
obvody snímačů zesilovačů |
Stmívače světla
regulátory ventilátoru ovládání topení |
Závěr
Pulse Width Modulation poskytuje efektivní a přesné řízení výkonu změnou pracovního cyklu spínacího signálu.Různé typy PWM a metody generování ovlivňují kvalitu, účinnost a výkon systému.PWM je široce používán v mikrokontrolérech, PLC a výkonové elektronice pro motory, osvětlení, přeměnu energie a řízení teploty.Díky své jednoduchosti a účinnosti je nezbytný v moderních elektronických aplikacích.
O nás
ALLELCO LIMITED
Přečtěte si více
Rychlý dotaz
Zašlete prosím dotaz, budeme odpovědět okamžitě.
Často kladené otázky [FAQ]
1. Může PWM při nesprávném použití poškodit motory nebo LED?
Ano, nesprávné nastavení PWM, jako je velmi vysoká frekvence, špatné filtrování nebo nesprávný výběr ovladače, může způsobit přehřívání, hluk nebo zkrácení životnosti.Použití správné frekvence PWM a správných obvodů ovladače zabrání poškození.
2. Jaká frekvence PWM je nejlepší pro motory, LED diody a ohřívače?
Motory obvykle používají frekvence PWM mezi 1 kHz a 20 kHz, LED často používají 500 Hz až 5 kHz a ohřívače mohou používat velmi nízké frekvence, jako je 1 Hz až 100 Hz.Ideální frekvence závisí na typu zátěže a aplikaci.
3. Potřebuji filtr, když používám PWM pro analogové signály?
Ano, dolní propust se doporučuje, když se PWM používá ke generování analogových napětí.Filtrování vyhlazuje tvar vlny PWM a snižuje zvlnění, takže je vhodné pro citlivé obvody.
4. Jaké komponenty jsou nutné k sestavení obvodu řízení PWM?
Základní PWM systém vyžaduje ovladač, spínací zařízení, obvod ovladače, napájecí zdroj a zátěž.V závislosti na úrovni výkonu mohou být zapotřebí další součásti, jako jsou filtry, ochranné obvody a chladiče.
5. Vytváří PWM elektrický šum nebo rušení?
PWM přepínání může generovat elektromagnetické rušení, pokud není správně navrženo.Použití stínění, filtrování, správného uzemnění a správné spínací frekvence pomáhá snížit problémy se šumem.

Technický přehled duálního provozního zesilovače AD8542AR
na 2026/01/13
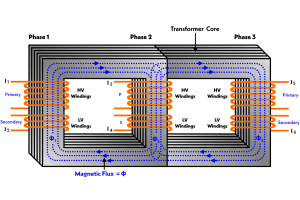
Výhody a nevýhody zapojení třífázových transformátorů
na 2026/01/12
Populární příspěvky
-

Komplexní instrukční sada Počítače: Jak změnily výpočetní techniku?
na 8000/04/18 147758
-

USB-C pinout a funkce
na 2000/04/18 111943
-
Použití primitiv simulace Xilinx Unified: Komplexní průvodce designem a simulací FPGA
na 1600/04/18 111349
-

Napájecí napětí v elektronice: Význam VCC, VDD, VEE, VSS a GND
na 0400/04/18 83721
-

Průvodce konektorem RJ45: Pinout, zapojení, typy kabelů a použití
na 1970/01/1 79508
-

Konečný průvodce barevnými kódy drátu v moderních elektrických systémech
Způsob, jakým naše elektrické systémy používají barvy, není jen pro vzhled.Každá barva drátu nyní označuje specifickou funkci, což usnadňuje správnou identifikaci a zpracování elektrických komponen...na 1970/01/1 66916
-

Průvodce čištění ventilu: funkce, příznaky, testování a náhrada za optimální výkon motoru
Vyčistit ventil je klíčovou součástí systému automobilu, který pomáhá udržovat vzduch čistý správou palivových párů, než mohou uniknout do atmosféry.To nejen pomáhá životnímu prostředí snížením zne...na 1970/01/1 63071
-

Kvalita (Q) Faktor: Rovnice a aplikace
Faktor kvality, neboli „Q“, je důležitý při kontrole toho, jak dobře induktory a rezonátory pracují v elektronických systémech, které používají rádiové frekvence (RF).„Q“ měří, jak dobře obvod mini...na 1970/01/1 63012
-

Dosažení maximálního výkonu s maximální větou přenosu energie
Maximální věta o přenosu výkonu vysvětluje, jak energie ze zdroje, jako je baterie nebo generátor, proudí do připojeného zatížení.Ukazuje přesnou podmínku, kdy zatížení přijímá nejvíce energie.Tent...na 1970/01/1 54081
-

Specifikace a kompatibilita baterie A23
Baterie A23 je malá baterie ve tvaru válce s vysokým napětím.Také se nazývá 23A, 23AE nebo MN21, běží při 12 voltech a mnohem vyšší než AA nebo AAA baterie.Díky jeho speciálnímu designu je...na 1970/01/1 52140
Horké číslo dílu
-

GRT21BC81C225KA02L
Murata Electronics
CAP CER 2.2UF 16V X6S 0805
SLA6022
Sanken Electric USA Inc.
TRANS 3NPN/3PNP DARL 12SIP
JAN1N1206A
Microchip Technology
DIODE GEN PURP 600V 12A DO203AA
MAX13082EESA+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER HALF 1/1 8SOIC
LTC2955ITS8-1#TRPBF
Analog Devices Inc.
IC PB ON/OFF CTRLR TSOT23-8
SKY85601-11
Skyworks Solutions Inc.
RF Switch SPDT 4.9GHz 5.85GHz Bu
MC10141L
onsemi
SHIFT REGISTER, 4-BIT
IRAM538-1065AE
Infineon Technologies
POWER DRIVE MODULE DIP
MBR0580-TP
Micro Commercial Co
DIODE SCHOTTKY 80V 500MA SOD123
DS9502P+
Analog Devices Inc./Maxim Integrated
TVS DIODE 7.5VWM 6TSOC
SN74ABT16244ADGG
Texas Instruments
IC BUFF NON-INVERT 5.5V 48TSSOP
MC9S08AW32CPUER
NXP USA Inc.
IC MCU 8BIT 32KB FLASH 64LQFP
BQ24192RGER
Texas Instruments
IC BATT CHG LI-ION 1CELL 24VQFN
DK1A1B-L2-24V
Panasonic Electric Works
RELAY GEN PURPOSE DPST 8A 24V
RB520S30T1G
onsemi
DIODE SCHOTTKY 30V 200MA SOD523
FSA8500UCX
Fairchild Semiconductor
AUDIO 3-POLE / 4-POLE MIC-GND SW
LT6402CUD-6#PBF
Analog Devices Inc.
IC OPAMP DIFF 2 CIRCUIT 16QFN
63USC10000MEFCSN30X50
Rubycon
CAP ALUM 10000UF 20% 63V SNAP -

74LVC1G126GW,125
Nexperia USA Inc.
IC BUF NON-INVERT 5.5V 5TSSOP
1812AA202KAT1A
KYOCERA AVX
CAP CER 2000PF 1KV NP0 1812
NC2D-JPL2-DC12V
Panasonic Electric Works
RELAY GEN PURPOSE DPDT 5A 12V
EPM7160ELC84-15
Intel
IC CPLD 160MC 15NS 84PLCC
MPXHZ6115AC6U
NXP USA Inc.
SENSOR 16.68PSIA 0.13" 4.7V SSOP
STA403A
Sanken Electric USA Inc.
TRANS 4NPN DARL 100V 4A SIP
AOC2423
Alpha & Omega Semiconductor Inc.
MOSFET P-CH 20V 2A 4ALPHADFN
IHW20N135R3
Infineon Technologies
REVERSE CONDUCTING IGBT W/MONOLT
BAV70-7-F
Diodes Incorporated
DIODE ARRAY GP 75V 150MA SOT23-3
GCM31MR72A154KA37L
Murata Electronics
CAP CER 0.15UF 100V X7R 1206
ADR5045BRTZ-REEL7
Analog Devices Inc.
IC VREF SHUNT 0.1% SOT23-3
S29PL032J60BFI123
Infineon Technologies
IC FLASH 32MBIT PARALLEL 48FBGA
12CTQ035STRL
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 35V D2PAK
CY7C1069AV33-10ZXC
Infineon Technologies
IC SRAM 16MBIT PAR 54TSOP II
USB20H04-JT
SMSC
4-PORT USB 2.0 HUB CONTROLLER
ISL95866HRZ
Renesas Electronics America Inc
IC PWM CONTROLLER
1SMB5940BT3G
onsemi
DIODE ZENER 43V 3W SMB
GBPC1508
Fairchild Semiconductor
BRIDGE RECTIFIER DIODE, 1 PHASE, -

DSEI2X30-10P
IXYS
DIODE MODULE 1KV 30A ECO-PAC1
VI-J0T-CZ
Vicor Corporation
DC DC CONVERTER 6.5V 25W
ISL6253HAZ-T
Intersil
IC BATT CHG LI-ION 2-4CEL 28QSOP
SM8S24ATHE3/I
Vishay General Semiconductor - Diodes Division
TVS DIODE 24VWM 38.9VC DO218AC
NLSX5012MUTAG
onsemi
IC TRANSLTR BIDIRECTIONAL 8UDFN
7447709270
Würth Elektronik
FIXED IND 27UH 4.6A 40 MOHM SMD
TSI148-133CLY
Renesas Electronics America Inc
IC INTERFACE SPECIALIZED 456BGA
LQH55PN2R7NR0L
Murata Electronics
FIXED IND 2.7UH 2.15A 40 MOHM
WP710A10SURC/E
Kingbright
LED RED CLEAR T-1 T/H
SN75LP1185DBR
Texas Instruments
IC TRANSCEIVER FULL 3/5 20SSOP
PIC18F2450-I/SP
Microchip Technology
IC MCU 8BIT 16KB FLASH 28SPDIP
74F161APC
Fairchild Semiconductor
IC BINARY COUNTER 4-BIT 16DIP
22201C106KAZ2A
KYOCERA AVX
CAP CER 10UF 100V X7R 2220
STW56N65M2
STMicroelectronics
MOSFET N-CH 650V 49A TO247
PTH08T231WAD
Texas Instruments
DC DC CONVERTER 0.69-5.5V
TLV431IDBVRG4
Texas Instruments
IC VREF SHUNT ADJ 1.5% SOT23-5
FAN5405UCX
onsemi
IC BATT CHG LI-ION 1CELL 20WLCSP
MPX2202GP
NXP USA Inc.
SENSOR 29.01PSIG 0.19" .04V