Úvod do řídicích systémů: Práce, typy a aplikace
Řídicí systémy používáte vždy, když stroj automaticky udržuje stálou hodnotu, jako je teplota, rychlost nebo hladina.Tento článek vysvětluje, co je řídicí systém, jak jeho části spolupracují a jak zpětná vazba udržuje výstup správný.Uvidíte také hlavní typy systémů a jejich chování v provozu.Jsou zahrnuta běžná použití, výhody a limity.Katalog

Obrázek 1. Příklad řídicího systému
Co je řídicí systém?
Řídicí systém je systém, který udržuje naměřenou hodnotu blízko požadované cílové hodnoty.Jeho účelem je automaticky upravit proces tak, aby výstup zůstal správný i při změně podmínek.Například pokojový termostat udržuje teplotu blízko nastavené úrovně a tempomat udržuje vozidlo na zvolené rychlosti.Regulátor hladiny vody také udržuje výšku vody na zvolené značce.Jednoduše řečeno, řídicí systém nepřetržitě kontroluje a opravuje proměnnou tak, aby odpovídala požadované hodnotě.
Základní prvky řídicího systému

Obrázek 2. Blokové schéma řídicího systému
Řídicí systém se skládá z několika standardních částí, z nichž každá plní specifický úkol.
• Referenční vstup (nastavená hodnota)
Toto je požadovaná hodnota, kterou se systém snaží udržet.Představuje vybranou cílovou podmínku.Systém vždy porovnává skutečnou hodnotu s touto referencí.
• Aktivační signál
Toto je signál vytvořený po porovnání požadovaných a skutečných hodnot.Představuje, kolik úprav je potřeba.Signál připraví systém na korekci.
• Ovládací prvky
Tyto části řídí rozhodovací proces.Určují nápravné opatření na základě přijatého signálu.Výstup z této fáze připravuje proces pro úpravu.
• Manipulovaná proměnná
Toto je nastavitelné množství odeslané do procesu.Změna této hodnoty ovlivní konečný výstup.Je to proměnná, kterou může systém přímo měnit.
• Rostlina
Závod je proces, který je řízen.Vytváří konečnou výstupní hodnotu.Cílem systému je udržet tento výstup na požadované úrovni.
• Rušení
Toto je nechtěná změna ovlivňující proces.Může posunout výstup od požadované hodnoty.Systém to musí kompenzovat.
• Řízená proměnná (výstup)
Toto je skutečný naměřený výsledek procesu.Ukazuje současný stav systému.Cílem je, aby se rovnal referenčnímu vstupu.
• Prvky zpětné vazby
Ty měří výstup a posílají informace zpět ke kontrole.Poskytují systému aktuální stav.To umožňuje určit korekci.
• Signál zpětné vazby
Toto je vrácená informace o výstupní hodnotě.Představuje stav procesu.Systém to používá pro srovnání.
Princip činnosti řídicího systému

Obrázek 3. Princip činnosti řídicího systému
Princip činnosti řídicího systému začíná zadáním požadované vstupní hodnoty do systému.Systém pak porovná tuto hodnotu se skutečnou výstupní hodnotou.Rozdíl mezi nimi se nazývá chybový signál.Pokud chyba existuje, systém vygeneruje opravný signál.Tato oprava upraví proces tak, aby se snížila chyba.Výstup se mění a je znovu průběžně kontrolován.Cyklus se opakuje, dokud výstup těsně neodpovídá požadované hodnotě.
Charakteristika řídicích systémů
Řídicí systémy jsou hodnoceny podle toho, jak dobře fungují během provozu.Tyto charakteristiky popisují kvalitu a spolehlivost odezvy systému.
|
Charakteristika |
Popis |
|
Stabilita |
Výstup ano
nerozcházet se;se po narušení vrátí na ustálenou hodnotu |
|
Přesnost |
Konečná chyba ≤
±2–5 % nastavené hodnoty |
|
Přesnost |
Výstup
variace ≤ ±1 % při stejném vstupu |
|
Doba odezvy
|
Počáteční
reakce nastane během naměřené doby zpoždění (td) |
|
Čas vzestupu |
Čas od 10 %
na 90 % konečné hodnoty |
|
Doba vyřízení |
Vstoupí a
zůstává v pásmu ±2 %. |
|
Přestřelit |
Vrchol přesahuje
konečná hodnota podle % částky |
|
Ustálený stav
Chyba |
Konstantní
offset zbývající po stabilizaci |
|
Citlivost |
ΔVýstup /
ΔPoměr změny parametrů |
|
Robustnost |
Udržuje
provozu i přes změnu rušení |
|
Šířka pásma |
Provozuje
efektivně až do −3 dB mezní frekvence |
|
Opakovatelnost |
Stejný vstup
produkuje stejný výstup v rámci tolerance |
|
Spolehlivost |
Provozuje
bez poruchy po jmenovitou provozní dobu (MTBF) |
|
Tlumení |
Oscilace
rozpad určený poměrem tlumení ζ |
|
Rychlost
Odezva |
Celkový čas do
dosáhnout stabilního stavu |
Typy řídicích systémů
Řídicí systémy jsou klasifikovány na základě toho, jak zacházejí s informacemi, signály a chováním odezvy.Jsou seskupeny podle využití zpětné vazby, formy signálu a matematického chování.
Systém řízení s otevřenou smyčkou
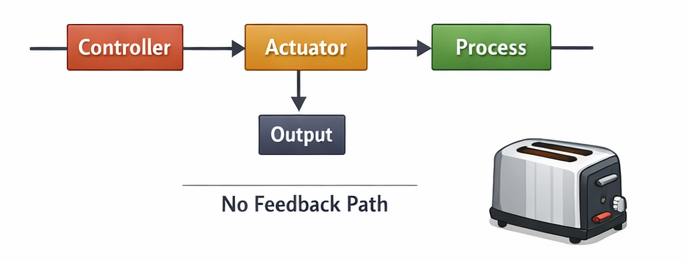
Obrázek 4. Schéma systému řízení s otevřenou smyčkou
Řídicí systém s otevřenou smyčkou je systém, kde výstup neovlivňuje činnost řízení.Systém odešle příkaz a předpokládá, že výsledek je správný, aniž by jej zkontroloval.Protože neexistuje žádná cesta zpětné vazby, nemůže automaticky opravit chyby nebo poruchy.Výkon závisí především na správné kalibraci a provozních podmínkách.Tyto systémy jsou jednoduché, levné a snadno se navrhují.Konečný výsledek však mohou ovlivnit změny zatížení nebo prostředí.Mezi běžné příklady patří časovač elektrického toustovače, ovládání časovače pračky a pevný časovač zavlažování.
Řídicí systém s uzavřenou smyčkou

Obrázek 5. Schéma systému řízení uzavřené smyčky
Řídicí systém s uzavřenou smyčkou je systém, který využívá zpětnou vazbu k automatické úpravě svého výstupu.Systém změří výsledek a porovná jej s požadovanou hodnotou.Pokud se objeví rozdíl, provede se oprava, aby se chyba snížila.Toto nepřetržité nastavení umožňuje přesný a stabilní provoz i za různých podmínek.Systémy s uzavřenou smyčkou poskytují lepší přesnost a spolehlivost než systémy s otevřenou smyčkou.Jsou široce používány v moderních aplikacích automatického řízení.Mezi typické příklady patří ovládání teploty klimatizace, tempomat vozidla a automatické regulátory napětí.
Systém kontinuálního řízení

Obrázek 6. Nepřetržitý (analogový) řídicí signál
Nepřetržitý řídicí systém zpracovává signály, které se plynule mění v čase.Vstup a výstup existují v každém okamžiku bez přerušení.Tyto systémy obvykle pracují s analogovými elektrickými nebo mechanickými signály.Vzhledem k tomu, že signály jsou spojité, odezva je také hladká a přirozená.Systémy se spojitým časem se běžně vyskytují v tradičních analogových regulátorech.Jsou vhodné pro fyzikální procesy vyžadující okamžitou reakci.Příklady zahrnují analogové regulátory rychlosti, ovládání hlasitosti audio zesilovače a hydraulické ovládání polohy ventilu.
Systém řízení diskrétního času
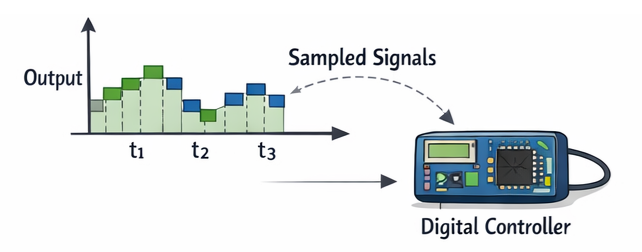
Obrázek 7. Diskrétní (digitální) řídicí signál
Systém řízení s diskrétním časem pracuje s použitím vzorkovaných datových signálů.Systém kontroluje a aktualizuje hodnoty pouze v určitých časových intervalech.Tyto signály jsou obvykle zpracovávány digitálními ovladači nebo mikroprocesory.Výstup se mění spíše krok za krokem než plynule.Takové systémy umožňují programovatelný provoz a flexibilní nastavení.Jsou široce používány v moderním elektronickém a počítačovém řízení.Příklady zahrnují řízení teploty založené na mikrokontroléru, digitální řízení otáček motoru a inteligentní domácí termostaty.
Lineární řídicí systém
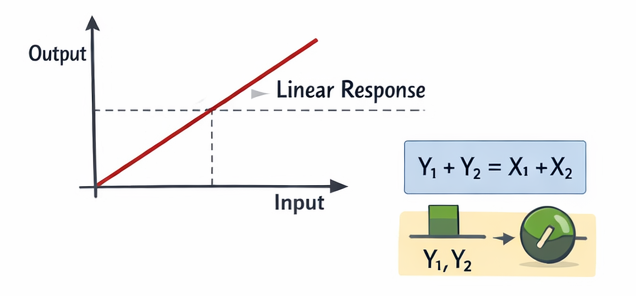
Obrázek 8. Vstupně-výstupní vztah lineárního systému
Lineární řídicí systém sleduje proporcionální vztah mezi vstupem a výstupem.Pokud se vstup zdvojnásobí, zdvojnásobí se za stejných podmínek i výstup.Tyto systémy splňují princip superpozice, kdy kombinované vstupy vytvářejí kombinované výstupy.Lineární chování umožňuje předvídatelnou a snadnou matematickou analýzu.Většina teoretických návrhů řízení předpokládá pro jednoduchost lineární provoz.Lineární modely pomáhají při navrhování stabilních a přesných systémů.Příklady zahrnují elektronické zesilovače s malým signálem a oblasti řízení motoru s nízkou zátěží.
Nelineární řídicí systém

Obrázek 9. Charakteristiky odezvy nelineárního systému
Nelineární řídicí systém má výstup, který není úměrný vstupu.Odezva se mění v závislosti na provozním rozsahu nebo podmínkách.Malé změny vstupu mohou způsobit velké odchylky výstupu nebo vůbec žádné změny.Často se objevují efekty jako saturace, hystereze a mrtvé zóny.Tyto systémy se obtížněji analyzují, ale přesněji reprezentují fyzikální procesy.Mnoho systémů se přirozeně chová nelineárním způsobem.Příklady zahrnují limity pohybu robotického ramene, chování magnetického pohonu a řízení průtoku ventilů v extrémních polohách.
Výhody a nevýhody řídicích systémů
Řídicí systémy zlepšují konzistenci a snižují manuální úsilí, ale také zavádějí složitost a náklady.
Výhody řídicích systémů
• Systém během provozu udržuje výkon blízko požadované hodnoty.
• Obsluha nemusí neustále seřizovat zařízení ručně.
• Stroje mohou běžet dlouhé hodiny bez častého zastavování.
• Systém automaticky koriguje změny podmínek.
• Provozní stav lze kontrolovat z panelu nebo vzdáleného displeje.
Nevýhody řídicích systémů
• Náklady na nastavení jsou vyšší než u jednoduchých manuálních systémů.
• K nastavení a servisu jsou zapotřebí kvalifikovaní pracovníci.
• Senzory a elektronické součásti mohou časem selhat.
• Hledání příčiny problémů může trvat déle.
• Systém je závislý na stabilní elektrické energii.
Aplikace řídicích systémů
Řídicí systémy se používají jak v průmyslové automatizaci, tak v každodenních zařízeních pro automatické udržování správného provozu.
1. Průmyslová výroba
Výrobní stroje zachovávají stálé rozměry a kvalitu výrobků.Automatizované montážní linky využívají regulaci k zajištění opakovatelnosti.To snižuje množství odpadu a zvyšuje účinnost.
2. Regulace teploty
Topné a chladicí zařízení udržuje komfortní podmínky prostředí.Budovy spoléhají na automatické přizpůsobení ke stabilizaci vnitřního klimatu.To zlepšuje energetickou účinnost a komfort.
3. Dopravní systémy
Vozidla využívají řízení rychlosti a stability pro hladší provoz.Moderní vozy obsahují tempomat a trakční systémy.Ty zvyšují bezpečnost jízdy a výkon.
4. Energetické systémy
Elektrické sítě regulují úrovně napětí a frekvence.Generátory upravují výkon tak, aby odpovídal požadavku na zatížení.Tím je zajištěna stabilní dodávka elektřiny.
5. Robotika a automatizace
Roboti provádějí přesné polohování a pohybové úkoly.Automatizované stroje pracují nepřetržitě s vysokou přesností.To umožňuje pokročilou výrobu.
6. Lékařské vybavení
Zařízení během léčby udržují kontrolované provozní podmínky.Monitorovací zařízení udržuje hodnoty v bezpečných mezích.To zvyšuje bezpečnost a spolehlivost pacientů.
7. Domácí spotřebiče
Každodenní zařízení automaticky spravují provozní nastavení.Pračky a chladničky udržují řádné provozní podmínky.To zjednodušuje každodenní úkoly.
8. Letecké systémy
Letadla a drony udržují stabilní letové podmínky.Automatické navádění udržuje správnou orientaci a nadmořskou výšku.To podporuje spolehlivou navigaci.
Řídicí systém vs automatizace vs vestavěné systémy
Tyto technologie spolu úzce souvisejí, ale slouží různým inženýrským účelům v rámci moderních elektronických a průmyslových produktů.
|
Funkce |
Ovládání
Systém |
automatizace |
Vložené
Systém |
|
Hlavní zaměření |
Regulace
proměnné |
Proces
provedení |
Zařízení
operace |
|
Účel |
Udržovat
požadovanou hodnotu |
Provádějte úkoly
automaticky |
Běh vyhrazený
funkcí |
|
Rozsah |
Specifické
chování procesu |
Celý
pracovní postup
|
Svobodný
produktové zařízení |
|
Rozhodnutí
Schopnost |
Na základě
naměřené hodnoty |
Na základě
naprogramovaná logika |
Na základě
firmware |
|
Použití zpětné vazby |
Často
vyžadováno |
Volitelné |
Volitelné |
|
Typ hardwaru |
Senzory a
akční členy |
Stroje a
ovladače |
Mikrokontrolér
deska |
|
Softwarová role |
Výpočet
a oprava |
Sekvenování
a koordinace |
Zařízení
řídící logiku |
|
Typ odezvy |
Kontinuální
úprava |
Úkol
provedení |
Funkční provoz |
|
Velikost systému |
Malé až
střední |
Střední až
velký |
Velmi malé |
|
Flexibilita |
Mírný |
Vysoká |
Omezené |
|
Čas
Požadavek |
Vysoká |
Mírný |
Vysoká |
|
Aplikace
úroveň |
Úroveň procesu |
Úroveň rostlin |
Úroveň produktu |
|
Příklad |
Teplota
ovládání |
Továrna
výrobní linka |
Chytré hodinky |
|
Integrace |
Část
automatizace |
Obsahuje
řídicí systémy |
Podporuje obojí |
Závěr
Řídicí systémy udržují stabilitu nepřetržitým porovnáváním skutečného výkonu s cílovou hodnotou a opravou jakékoli chyby.Jejich výkon závisí na základních prvcích, jako je zpětná vazba, činnost regulátoru a řízený proces.Různé klasifikace definují, jak jsou signály zpracovávány a jak přesně systém reaguje na poruchy.Díky těmto schopnostem jsou řídicí systémy široce používány v průmyslu, dopravě, energetice, lékařských přístrojích a každodenním vybavení.
O nás
ALLELCO LIMITED
Přečtěte si více
Rychlý dotaz
Zašlete prosím dotaz, budeme odpovědět okamžitě.
Často kladené otázky [FAQ]
1. Jaký je rozdíl mezi regulátorem a řídicím systémem?
Regulátor je pouze rozhodovacím zařízením (jako PLC nebo PID regulátor).Řídicí systém zahrnuje regulátor plus senzory, akční členy a regulovaný proces.
2. Co je PID regulace a proč je důležitá?
PID regulace využívá proporcionální, integrální a derivační akce k minimalizaci chyb rychle a hladce.Zlepšuje stabilitu, přesnost a rychlost odezvy ve většině průmyslových systémů.
3. Proč řídicí systémy někdy oscilují nebo loví?
Oscilace nastává, když jsou korekce příliš agresivní nebo zpožděné.Špatné ladění, pomalé snímače nebo přílišné zesílení způsobují opakované překmity výstupu.
4. Co je saturace akčního členu?
K nasycení aktuátoru dojde, když aktuátor dosáhne svého fyzického limitu a nemůže dále zvyšovat výkon.To zabraňuje systému opravovat velké chyby.
5. Jak řídicí systémy zvládají zpoždění v procesech?
Používají metody ladění, filtry nebo prediktivní algoritmy ke kompenzaci zpoždění, aby se oprava uskutečnila ve správný čas.

Průvodce rezistorem 4,7 kΩ: Barevný kód, použití, testování a srovnání hodnot
na 2026/02/16

Miniaturní jistič (MCB): Princip činnosti, typy, hodnocení a průvodce výběrem
na 2026/02/15
Populární příspěvky
-

Komplexní instrukční sada Počítače: Jak změnily výpočetní techniku?
na 8000/04/18 147757
-

USB-C pinout a funkce
na 2000/04/18 111934
-
Použití primitiv simulace Xilinx Unified: Komplexní průvodce designem a simulací FPGA
na 1600/04/18 111349
-

Napájecí napětí v elektronice: Význam VCC, VDD, VEE, VSS a GND
na 0400/04/18 83719
-

Průvodce konektorem RJ45: Pinout, zapojení, typy kabelů a použití
na 1970/01/1 79508
-

Konečný průvodce barevnými kódy drátu v moderních elektrických systémech
Způsob, jakým naše elektrické systémy používají barvy, není jen pro vzhled.Každá barva drátu nyní označuje specifickou funkci, což usnadňuje správnou identifikaci a zpracování elektrických komponen...na 1970/01/1 66898
-

Kvalita (Q) Faktor: Rovnice a aplikace
Faktor kvality, neboli „Q“, je důležitý při kontrole toho, jak dobře induktory a rezonátory pracují v elektronických systémech, které používají rádiové frekvence (RF).„Q“ měří, jak dobře obvod mini...na 1970/01/1 63010
-

Průvodce čištění ventilu: funkce, příznaky, testování a náhrada za optimální výkon motoru
Vyčistit ventil je klíčovou součástí systému automobilu, který pomáhá udržovat vzduch čistý správou palivových párů, než mohou uniknout do atmosféry.To nejen pomáhá životnímu prostředí snížením zne...na 1970/01/1 63008
-

Dosažení maximálního výkonu s maximální větou přenosu energie
Maximální věta o přenosu výkonu vysvětluje, jak energie ze zdroje, jako je baterie nebo generátor, proudí do připojeného zatížení.Ukazuje přesnou podmínku, kdy zatížení přijímá nejvíce energie.Tent...na 1970/01/1 54081
-

Specifikace a kompatibilita baterie A23
Baterie A23 je malá baterie ve tvaru válce s vysokým napětím.Také se nazývá 23A, 23AE nebo MN21, běží při 12 voltech a mnohem vyšší než AA nebo AAA baterie.Díky jeho speciálnímu designu je...na 1970/01/1 52120
Horké číslo dílu
-

VOD217T
Vishay Semiconductor Opto Division
OPTOISOLATOR 4KV 2CH TRANS 8SOIC
594D107X9016C2T
Vishay Sprague
CAP TANT 100UF 10% 16V 2812
C1608JB1E685K080AC
TDK Corporation
CAP CER 6.8UF 25V JB 0603
MAX14753EUE+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SP4TX2 130OHM 16TSSOP
LMV7291MG
Texas Instruments
IC COMPARATOR 1 GEN PUR SC70-5
2SK4087LS-1E
onsemi
MOSFET N-CH 600V 9.2A TO220F-3FS
SN89019B0RSLR
Texas Instruments
PROTOTYPE
AT32UC3B164-Z1UT
Microchip Technology
IC MCU 32BIT 64KB FLASH 48QFN
LTC1821-1BCGW#TRPBF
Analog Devices Inc.
IC DAC 16BIT V-OUT 36SSOP
TL084CPT
STMicroelectronics
IC OPAMP JFET 4 CIRCUIT 14TSSOP
C1608X7S0J685K080AC
TDK Corporation
CAP CER 6.8UF 6.3V X7S 0603
08055C823K4T2A
KYOCERA AVX
CAP CER 0.082UF 50V X7R 0805
RT1206BRD073K3L
YAGEO
RES SMD 3.3K OHM 0.1% 1/4W 1206
S-13A1A12-E6T1U3
ABLIC Inc.
IC REG LINEAR 1.2V 1A 6HSOP
MAX8958EWW+T
Analog Devices Inc./Maxim Integrated
PMIC FOR SMART PHONE APPLICATION
MAX3386EIPWR
Texas Instruments
IC TRANSCEIVER FULL 3/2 20TSSOP
TLC7733IPWRG4
Texas Instruments
IC SUPERVISOR 1 CHANNEL 8TSSOP
INA2141PA
Burr Brown
IC INST AMP 2 CIRCUIT 16DIP -

UPC29M12T-E1-AZ
Renesas Electronics America Inc
IC REG LINEAR FIXED LDO REG
MCD224-22IO1
IXYS
MOD THYRISTOR/DIODE 2200V Y1-CU
VC060305A150RP
KYOCERA AVX
VARISTOR 8.5V 30A 0603
P1168.333NLT
Pulse Electronics
FIXED IND 33UH 2.2A 94 MOHM SMD
S-8521E15MC-BLAT2G
ABLIC Inc.
IC REG CTRLR BUCK SOT23-5
MAX3272AEGP-T
Analog Devices Inc./Maxim Integrated
LOW-POWER LIMITING AMPLIFIER
UCC2946PW
Texas Instruments
IC SUPERVISOR 1 CHANNEL 8TSSOP
MMO140-12IO7
IXYS
MODULE AC CONTROL 1200V ECO-PAC1
MMSZ5262B
Good-Ark Semiconductor
DIODE, ZENER, 0.5W, 51V,SOD-123
SP3087EEN-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 1/1 8SOIC
LM358WDT
Rohm Semiconductor
IC OPAMP GP 2 CIRCUIT 8SO
MRF177
MACOM Technology Solutions
FET RF 2CH 65V 400MHZ 744A-01
744765110A
Würth Elektronik
FIXED IND 10NH 480MA 195MOHM SMD
CP2103-GMR
Silicon Labs
IC CTRLR BRIDGE USB-UART 28MLP
AOZ1320CI-05
Alpha & Omega Semiconductor Inc.
IC PWR SWITCH P-CHAN 1:1 SOT23-6
C1005X8R1H681K050BA
TDK Corporation
CAP CER 680PF 50V X8R 0402
SN74ABT162244DGGR
Texas Instruments
IC BUF NON-INVERT 5.5V 48TSSOP
TNPW060341K7BEEN
Vishay Dale
RES 41.7K OHM 0.1% 1/10W 0603 -

GRM155R61E105KE11D
Murata Electronics
CAP CER 1UF 25V X5R 0402
CL31C151JIFNNNE
Samsung Electro-Mechanics
CAP CER 150PF 1KV C0G/NP0 1206
GRM188R61A105KA61J
Murata Electronics
CAP CER 1UF 10V X5R 0603
ADL5501AKSZ-R7
Analog Devices Inc.
IC RF DETECT 50MHZ-6GHZ SC70-6
GRM188R61A475KAAJD
Murata Electronics
CAP CER 4.7UF 10V X5R 0603
APT38F80B2
Microchip Technology
MOSFET N-CH 800V 41A T-MAX
MOC8020
onsemi
OPTOISO 5.3KV DARLINGTON 6-DIP
1808AA100KAT1A
KYOCERA AVX
CAP CER 10PF 1KV C0G/NP0 1808
LFB2H2G45SG7A204
Murata Electronics
2450.0 MHZ MULTI LAYER CHIP
LK160847NM-T
Taiyo Yuden
FIXED IND 47NH 150MA 200MOHM SMD
GRM0335C1E220JA01D
Murata Electronics
CAP CER 22PF 25V C0G/NP0 0201
SN74LVC138APWR
Texas Instruments
IC DECODER/DEMUX 1X3:8 16TSSOP
32006-D22
Bussmann (Eaton)
MALE O/PUT TANG VERSION DCR 3749
JFW100A1
ABB Power Electronics Inc.
DC DC CONVERTER 5V 100W
CS51414GD8G
onsemi
IC REG BUCK ADJ 1.5A 8SOIC
P6SMB15CAT3
onsemi
TVS DIODE 12.8VWM 21.2VC SMB
NFA18SL407V1A45L
Murata Electronics
FILTER LC 400MHZ SMD
TIP41BG
onsemi
TRANS NPN 80V 6A TO220