Průvodce řízením rychlosti motoru: Techniky, metody a aplikace AC a DC
Tato příručka je o tom, jak ovládáme rychlost elektrických motorů.Vysvětluje to, jak mohou být motory AC (střídavý proud) i DC (přímý proud) vyrobeny tak, aby běžely rychleji nebo pomalejší v závislosti na tom, co stroj potřebuje.Hovoří o nástrojích jako VFDS (variabilní frekvenční jednotky) pro AC motory a PWM (modulace šířky pulsu) pro DC Motors.Dozvíte se také, jak lze různé části motoru, jako je stator a rotor, nastavit na změnu rychlosti.Průvodce sdílí různé metody používané ve starších systémech a moderních technologiích a ukazuje, kde se tyto motory používají v našem životě.Katalog

Co je řízení rychlosti motoru?
Řízení rychlosti motoru znamená nastavení, jak rychle se motor otáčí, aby vyhovoval přesným potřebám úkolu.Nejde jen o náhodnou změnu rychlosti, ale o přizpůsobení chování motoru tomu, co systém vyžaduje kdykoli.Tato schopnost jemně doladit rychlost zlepšuje energetickou účinnost, prodlužuje životnost zařízení snížením mechanického napětí a zajišťuje lepší přesnost v provozu.Například dopravník může být nutný zpomalit pro jemné předměty nebo zrychlit, když je linka jasná.Elektrické motory se často musí přizpůsobit měnícím se zatížením, úkolům nebo prostředí.Bez nastavitelné rychlosti by motory probíhaly pouze jednou pevnou rychlostí, což by byly méně užitečné a méně efektivní.
Rychlost je řízena úpravou elektrického vstupu.V AC Motors to obvykle znamená změnit frekvenci napájení.U DC motorů jsou změny napětí běžnější.Některé systémy také používají senzory zpětné vazby ke sledování výkonu a provádění úprav.Tato smyčka zpětné vazby pomáhá udržovat konzistentní rychlost, i když se zatížení liší.Řízení rychlosti se pohybuje od základních rezistorů ve starších systémech po pokročilé digitální regulátory pomocí mikroprocesorů a sofistikovaných algoritmů.Tyto novější metody umožňují motorům hladce a přesně reagovat na měnící se podmínky.
AC regulace rychlosti motoru
Rychlost motoru střídavého proudu závisí na dvou věcech: frekvence napájení střídavého proudu a počet pólů v motoru.Abychom změnili rychlost, změníme frekvenci.To je místo, kde přicházejí variabilní frekvenční jednotky (VFD). VFD převádí pevný frekvenční střídavý výkon na DC, vyhladí jej a poté jej převádí zpět na AC na požadované frekvenci.To umožňuje, aby byla rychlost motoru upravena přesnost.Řízením frekvence i napětí může VFD efektivněji řídit motorový moment a rychlost.

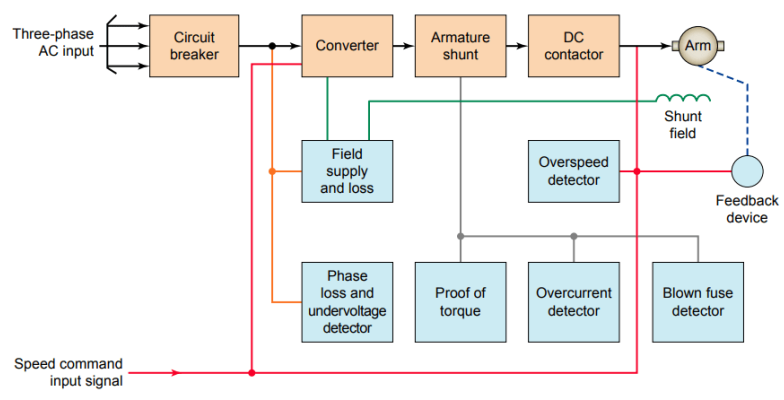
Obrázek 2. blokové schéma systému řízení rychlosti motoru střídavého proudu
Moderní variabilní frekvenční jednotky (VFD) přesahují pouze úpravu rychlosti motoru začleněním pokročilých kontrolních technik, jako je ovládání vektoru, které odděluje točivý moment a tok pro jemné vyladěné výkon a přímé řízení točivého momentu (DTC), která poskytuje rychlé a přesné úpravy točivého momentu.Tyto schopnosti umožňují motorům zrychlit, zpomalit a udržovat zátěž efektivně bez nutnosti dalších mechanických komponent nebo přidaného napětí.Funkce, jako jsou funkce soft-start, vestavěná ochrana přetížení a pokročilá diagnostika způsobily, že VFD byly důležité v celé řadě aplikací, od úpravny vody po systémy výtahu.
DC řízení rychlosti motoru
Motory DC jsou často vybírány, když jsou nutné rychlé a přesné změny rychlosti.Jejich rychlost se mění přímo s napětím naneseným na armaturu.Zátěž také ovlivňuje rychlost, zvýšené zatížení obvykle zpomaluje motor.Nejúčinnější metodou dnes je PWM.Používá vysokofrekvenční napěťové impulsy s nastavitelnými šířkami k řízení průměrného napětí dodávaného do motoru.To umožňuje přesnou kontrolu rychlosti s nízkou ztrátou energie.
Obrázek 3. Blokové diagram systému řízení rychlosti motoru DC
Mezi další metody řízení patří kontrola pole, kde nastavení proudu v magnetickém poli mění rychlost motoru, snižování pole zvyšuje rychlost, ale snižuje točivý moment;Kontrola odporu armatury, jednoduchá, ale neefektivní metoda, která přidává odolnost ke snížení napětí a rychlosti;a ovládání uzavřené smyčky, které používá senzory ke sledování rychlosti a automaticky nastavení napětí nebo proudu pro udržení konzistentního výkonu při různých zátěžích.Vzhledem k jejich vysoké přesnosti a citlivosti se DC motory běžně používají v robotice, zdravotnickém vybavení a nástrojích napájených na baterii.
Podrobné techniky: AC vs. DC
Techniky řízení rychlosti motoru AC
Techniky řízení rychlosti střídavého motoru jsou založeny na vzorci pro synchronní rychlost:

Kde:
• NS je synchronní rychlost (v RPM)
• F je frekvence napájecího střídavého proudu (v Hz)
• P je počet pólů motoru
Změnou frekvence napájení lze rychlost motoru nastavit, čehož se dosáhne pomocí variabilních frekvenčních jednotek (VFD).Existují dva hlavní typy kontroly VFD: Skalární (V/F) kontrola, která udržuje konstantní poměr napětí k frekvenci a je jednoduchý a stabilní pro základní aplikace;a ovládání vektoru, které odděluje komponenty točivého momentu a magnetického toku, aby umožnily přesnější a responzivní kontrolu, zejména při nízkých rychlostech.Pokročilejší systémy zahrnují kontrolu bez senzorů a odhadují polohu motoru bez potřeby fyzických senzorů.Kromě toho VFDS podporuje funkce, jako je kontrolované zrychlení (rampování), omezení točivého momentu a brzdění, díky čemuž jsou vysoce vhodné pro náročné aplikace, jako jsou výtahy, jeřáby a stroje CNC.
Techniky řízení rychlosti motoru DC
Rychlost motoru DC se řídí vztahem,

Kde:
• V je napětí kotvy
• IA je proud armatury
• RA je odpor armatury
• φ je magnetický tok
Mezi různými technikami řízení rychlosti zůstává modulace šířky pulsu (PWM) nejúčinnější kvůli jeho účinnosti a citlivosti.Mezi další metody patří oslabení toku, což zvyšuje rychlost snížením síly magnetického pole vhodnou v situacích, kdy je přijatelný nižší točivý moment;Kontrola odolnosti proti armatuře, která je díky energetickým ztrátám jednodušší, ale méně efektivní;a ovládání uzavřené smyčky se zpětnou vazbou, která používá senzory, jako jsou kodéry nebo tachogenerátory, k zajištění přesné a adaptivní regulace rychlosti.
Metody řízení rychlosti střídavého motoru
Ovládání boční kontroly statoru
Řízení napětí: Tato metoda zpomaluje motor snížením napájecího napětí aplikovaného na vinutí statoru.Jak napětí klesá, síla magnetického pole klesá, což vede k nižším točivým momentu a rychlosti.Zatímco jednoduchost této metody je atraktivní pro základní aplikace, zejména při zatížení ventilátoru nebo čerpadla, je to obecně neefektivní, protože motor nadále čerpá vysoký proud i při snížených rychlostech, což vede ke zvýšenému ztrátě tepla a energie.Je vyhrazen pro operace s lehkou službou, kde není vyžadována přesná kontrola.
Frekvenční řízení (VFD): Variabilní frekvenční jednotky (VFD) Upravte jak napětí, tak frekvenci dodávané motoru, což umožňuje přesné a efektivní kontrolu rychlosti a točivého momentu.Udržováním konstantního poměru voltů na Hertz zachovává VFDS magnetickou rovnováhu motoru a točivý moment v širokém rozsahu rychlosti.Tato metoda se široce používá v moderních průmyslových a komerčních aplikacích kvůli jeho energetické účinnosti, přizpůsobivosti a schopnosti hladce zvládnout různé podmínky zatížení.
Změna tyče: Některé indukční motory veverky jsou navrženy s vinutími statoru, které lze překonfigurovat, aby se změnil počet magnetických pólů.Změna počtu pólů se synchronní rychlost změny motoru mění v diskrétních krocích (např. Od dvoupólového provozu), což umožňuje motoru běžet při různých pevných rychlostech.Tato metoda poskytuje jednoduchý a robustní způsob, jak dosáhnout více rychlostního ovládání, aniž by vyžadoval externí elektroniku, i když je omezena na předdefinovaná nastavení rychlosti a postrádá hladkou variabilitu.
Boční ovládání rotoru
Vnější odpor rotoru : Tato technika zahrnuje přidání variabilních rezistorů do obvodu rotoru sklizeňskými kroužky a kartáči.Zvýšením odolnosti rotoru se zvýší skluz, což snižuje rychlost rotoru a poskytuje lepší ovládání točivého momentu, užitečné během spuštění nebo pro zatížení, které vyžadují variabilní točivý moment.Část elektrické energie je však rozptýlena jako teplo v externích rezistorech, což způsobuje, že metoda je neefektivní pro nepřetržité používání.
Kaskádová kontrola: V tomto nastavení jsou mechanicky spojeny dva motory a jeden motor (sekundární nebo pomocný motor) je elektricky připojen k obvodu rotoru hlavního (primárního) motoru.Toto uspořádání umožňuje sdílení energie a řízení rychlosti v pevných krocích v závislosti na návrhu elektrického a mechanického spojení.Ačkoliv relativně složitá a méně běžná v moderních systémech byla kaskádová kontrola účinným způsobem, jak řídit velká zatížení a střední rychlosti ve starších průmyslových strojích.
EMF injekce: Elektromotická síla (EMF) injekce, která se používá v systémech, jako jsou jednotky Kramer a Scherbius, zahrnuje vstřikování kontrolovaného napětí specifické frekvence a fáze do obvodu rotoru.To mění frekvenci skluzu rotoru a umožňuje operaci proměnné rychlosti s lepší účinností než metody odporu.Tyto jednotky jsou vhodné pro vysoce výkonné aplikace, kde je důležitá přesná regulace rychlosti a obnovení energie, například ve velkých kompresorech, čerpadlech nebo mlýnech.
Metody řízení rychlosti motoru DC
Kontrola motoru SHUNT
Ovládání pole: Tato metoda zahrnuje vložení variabilního rezistoru do série s vinutím pole stejnosměrného motoru DC.Zvýšením rezistence se proud přes vinutí pole snižuje, což oslabuje magnetický tok.Podle rychlostní rovnice DC motoru vede snížení toku ke zvýšení rychlosti, za předpokladu napětí konstantní kotvy.Ovládání pole je relativně efektivní pro zvyšování rychlosti nad hodnotou hodnoty.Protože však oslabení pole také snižuje točivý moment a může způsobit nestabilitu nebo nadměrné řízení, musí být tato metoda použita opatrně a často vyžaduje ochranná opatření.
Řízení napětí kotvy: Při této metodě se napětí dodávané do kotvy přímo mění a zároveň udržuje konstantní tok pole.Snížení napětí kotvy úměrně snižuje rychlost a točivý moment.Tato technika je jednoduchá implementovat a umožňuje hladké ovládání pod jmenovitým rychlostí.Je však méně energeticky účinná, zejména při zatížení, protože jakákoli přebytečná energie je často rozptýlena jako teplo v kontrolních rezistorech nebo v energetické elektronice.
Systém Ward-Leonard: Tento klasický řídicí systém používá sadu motorového generátoru (M-G), kde se vytváří variabilní napětí ovládáním výstupu generátoru DC řízeného AC nebo DC motorem.Generované napětí je přiváděno do kotvy motoru zkratu, což umožňuje jemné a nepřetržité kontrolu nad širokým rozsahem rychlosti v obou směrech.Systém Ward-Leonard, ačkoli nákladný a objemný, poskytuje vynikající výkon, pokud jde o řízení točivého momentu a regulaci rychlosti, což je ideální pro náročné aplikace, jako jsou zvedáky výtahu, válcovací mlýny a tiskové lisy.
Řízení motoru řady
Polní přepínač: Rezistor (odklon) je spojen souběžně s vinutím pole řady.To umožňuje část proudu obejít vinutí pole, oslabení magnetického toku a zvýšení rychlosti motoru.Tato metoda poskytuje základní formu řízení rychlosti a užitečná v aplikacích, jako je trakce, kde jsou vyžadovány dočasné zvýšení rychlosti.Snižuje však točivý moment a musí být pečlivě vyvážen, aby se zabránilo nestabilitě nebo přehřátí motoru.
Přepínač kotvy : Umístěním rezistoru paralelně s obvodem kotvy lze proudové rozdělení mezi kotvou a pole upravit.Tato nastavení mění charakteristiku motoru točivého momentu.Jedná se o více nuanční metodu než přepínače pole, která umožňuje lepší kontrolu nad točivým momentem, ale zavádí složitost a vyžaduje pečlivé ladění, aby se zabránilo ztrátám nebo poškození výkonu.
Poklepané pole a re-skupiny: Tato metoda modifikuje sílu magnetického pole změnou počtu aktivních otočení v vinutí pole.Použitím kohoutků na vinutí nebo přeskupení připojení (re-skupiny) lze vybrat různé magnetické konfigurace pro posun křivky rychlosti-torque.Poskytuje kroky s pevnou rychlostí a běžně se používá v zařízení, kde jsou dostatečné předvídatelné změny rychlosti, jako jsou jeřáby nebo zvedáky.
Odporová kontrola: Základní metoda, kde jsou externí rezistory přidány do série s motorem k poklesu napětí a snižování rychlosti.I když je tato metoda jednoduchá a levná, je velmi neefektivní, protože velká část elektrické energie je ztracena jako teplo.Obecně se používá pouze v nízkonákladových nebo starších systémech, kde účinnost není primárním problémem.
Série-paralelní kontrola: V této technice jsou dva nebo více řadových motorů připojeny buď v sérii nebo paralelně.V sérii sdílejí stejný proud a pracují při nižší rychlosti s vyšším točivým momentem;Paralelně pracují při vyšší rychlosti se sníženým točivým momentem.Tato metoda řízení umožňuje krokové změny rychlosti a běžně se vyskytuje v systémech elektrické trakce, jako jsou tramvaje a vlaky, kde je potřeba jednoduchá a spolehlivá kontrola rychlosti.
Aplikace
Aplikace pro řízení rychlosti motoru AC
Průmysl
V průmyslovém nastavení hraje řízení rychlosti motoru střídavého motoru roli při optimalizaci procesů zahrnujících dopravníky, mixéry, čerpadla a jiné mechanické systémy.Přesně regulací rychlosti motoru pomocí zařízení, jako jsou disky s proměnlivou frekvencí (VFD), lze operace vyladit na specifické požadavky na výrobu, což vede ke zlepšení přesnosti procesu, snížení mechanického napětí a úspor energie.Například zpomalení dopravního pásu během inspekce produktu nebo jemné zvyšování mixéru snižuje opotřebení a zvyšuje bezpečnost.Tato flexibilita zvyšuje celkovou účinnost a prodlužuje životnost strojů.
HVAC
Systémy vytápění, ventilace a klimatizace (HVAC) těží z motorů řízených rychlostí u ventilátorů, dmychadel a kompresorů.Úpravou rychlosti motoru v reakci na podmínky prostředí a požadavků na systém se sníží spotřeba energie, zejména v proměnných situacích zatížení, jako jsou kolísání teploty nebo změny obsazenosti.VFD umožňují měkké a jemno doladěné modulaci cyklů proudění vzduchu a chlazení, což vede k tiššímu provozu, zvýšenému pohodlí a nižším provozním nákladům v obytných i komerčních budovách.
Domácí zařízení
Moderní domácí spotřebiče, jako jsou pračky, chladničky a myčky nádobí, stále více využívají střídavé motory řízené rychlostí ke zlepšení výkonu a energetické účinnosti.Například motory s proměnnou rychlostí v pračkách umožňují různé promývací cykly s optimalizovaným agitací a rychlostí roztočení, snižují hluk a vibrace.V chladničkách mohou kompresory s kontrolou rychlosti hladce upravit chladicí cykly a udržovat konzistentní teploty s menším spotřebou energie.
Inteligentní infrastruktura
V inteligentních budovách a dopravních systémech je řízení rychlosti motoru střídavého proudu nedílnou součástí správy výtahů, eskalátorů, pohyblivých chodníků a automatizovaných dveří.Tyto systémy často používají inteligentní řadiče motorů, které se propojují se systémy správy budov (BMS) nebo sítěmi IoT, aby poskytovaly kontrolu, diagnostiku a monitorování energie.Například výtahy mohou upravit profily zrychlení a zpomalení na základě zatížení spolujezdce nebo poptávky po podlaze, což zlepšuje pohodlí jízdy a využití energie.Eskalátory mohou zpomalit nebo pozastavit, když se nepoužívají, snižovat nečinnou spotřebu energie a sladit s cíli udržitelnosti v moderním návrhu infrastruktury.
Aplikace řízení rychlosti motoru DC
Robotika
DC motory se široce používají v robotice kvůli jejich schopnosti poskytovat rychlou reakci a přesnou rychlost a kontrolu polohy.S pomocí modulace pulzní šířky (PWM) a systémů zpětné vazby, jako jsou kodéry, mohou robotické systémy dosáhnout jemnozrnného pohybu nezbytného pro úkoly, jako je manipulace s objekty, navigace a koordinace.Tato citlivost je důležitá v aplikacích od průmyslových robotických zbraní po autonomní mobilní roboty.
Elektrická vozidla
U elektrických vozidel (EV) je DC rychlost motoru dobrá pro hladké zrychlení, zpomalení a celkový výkon pohonu.Nastavením napětí a proudu dodávaného do motoru může vozidla hladce přecházet mezi různou hladinou rychlosti a točivého momentu, čímž se zvyšuje pohodlí a ovládání jízdy.Regenerativní brzdové systémy používají kontrolovaný DC motorický provoz k přeměně kinetické energie zpět na elektrickou energii během brzdění, zlepšení celkové účinnosti a prodloužení výdrže baterie.Díky těmto funkcím činí DC motory ideální pro elektrické transportní systémy dvou kol i čtyř kol.
Spotřebitelská zařízení
DC Motors jsou jádrem mnoha kompaktních a přenosných spotřebitelských zařízení, včetně elektrických nářadí, vysoušečů vlasů, ventilátorů chlazení počítače a malých kuchyňských spotřebičů.Řízení rychlosti v těchto aplikacích zajišťuje optimální výkon, bezpečnost a energetickou účinnost.Například v energetických cvičeních umožňují spouštěče variabilní rychlosti upravit točivý moment a rychlost pro různé materiály, zatímco u ventilátorů poskytuje změna rychlosti lepší pohodlí a kontrolu hluku.Kompaktní design a snadnost elektronického ovládání způsobují, že DC motory jsou vhodné pro zařízení na baterii.
Lékařské a laboratorní vybavení
Lékařské a laboratorní nástroje vyžadují vysoce kontrolované, tiché a spolehlivé provoz motoru.Motory DC s přesnou kontrolou rychlosti se používají v zařízeních, jako jsou infuzní čerpadla, odstředivky, chirurgické nástroje a automatizované analyzátory.Tyto aplikace vyžadují tichý provoz, aby se zabránilo narušení citlivé prostředí, spolu s přesnou kontrolou pohybu pro přesné dodání nebo měření tekutin, vzorků nebo chirurgických pohybů.Beztáčkové DC motory (BLDC) jsou upřednostňovány pro jejich nízký hluk, nízkou údržbu a konzistentní výkon.
Srovnávací tabulka
|
Funkce |
AC Motor |
DC motor |
|
Zdroj energie |
Používá střídavý proud (AC) |
Používá přímý proud (DC) |
|
Jak je kontrolována rychlost |
Změny rychlosti úpravou frekvence pomocí proměnné
Frekvenční jednotka (VFD) |
Změny rychlosti úpravou napětí nebo proudu pole |
|
Kontrolní složitost |
Složitější: potřebuje VFD, ovládání vektoru, někdy
senzory |
Jednodušší: Používá změny napětí, PWM nebo ovládání pole |
|
Doba odezvy |
Pomalejší odpověď v důsledku zpoždění VFD |
Rychlá reakce, zejména s digitálním ovládáním |
|
Počáteční točivý moment |
Nízké bez speciálních metod kontroly |
Ve výchozím nastavení vysoký počáteční točivý moment |
|
Točivý moment při různých rychlostech |
Točivý moment může klesnout při nízkých rychlostech |
Udržuje silný točivý moment při všech rychlostech |
|
Stabilita rychlosti |
Dobré se systémy s uzavřenou smyčkou;méně stabilní bez |
Vynikající kontrola a stabilita napříč všemi rychlostmi |
|
Rozsah rychlosti |
Omezeno designem pohonu a motoru |
Široký rozsah od velmi nízkých po vysokou rychlostí |
|
Potřeby údržby |
Nízké: žádné kartáče nebo komutátory |
Vyšší: štětce se opotřebovávají, pokud nejsou skromné |
|
Trvanlivost v drsném prostředí |
Robustnější a lepší pro těžké podmínky |
Kartáčové motory jsou v drsném prostředí méně odolné |
|
Manipulace s teplem |
Často postavené z chladicích systémů |
Může přehřát, pokud není správně ochlazeno |
|
Hluk a rušení (EMI) |
Může produkovat elektrický šum (EMI);potřebuje filtrování |
Kartáčované motory vydávají hluk;bez kartáčovství jsou tišší |
|
Potřeby napájení |
Pracuje přímo s AC Mains (např. 120V nebo 240V) |
Potřebuje DC nabídka nebo převodník z AC |
|
Směr obrácení |
Vyžaduje programování ve VFD |
Snadné: Stačí reverzní polarita nebo použijte H-Bridge |
|
Regenerativní brzdění |
Komplikované a nákladné nastavení |
Snadné a efektivní, používané v EV a robotice |
|
Obnovení energie |
Možné s pokročilými VFD |
Přirozeně podporuje obnovení energie |
|
Integrace digitální kontroly |
Se připojuje k systémům, jako je PLCS prostřednictvím VFD |
Snadno ovládáno mikrokontroléry |
|
Účinnost
|
Velmi efektivní při stabilních rychlostech |
Velmi efektivní s variabilní rychlostí nebo častým
startuje/zastává |
|
Velikost řídicího systému |
VFD mohou být velké a potřebují chlazení |
DC ovladače jsou malé a snadno se instalují |
Závěr
Řízení rychlosti motoru je v dnešních strojích a zařízeních velmi důležitá.Pomáhá ušetřit energii, způsobuje, že stroje vydrží déle a udržuje je hladce.AC motory často používají VFD ke změně rychlosti úpravou frekvence výkonu.DC motory mění rychlost nastavením napětí nebo pomocí rychlých on-off signálů (PWM).Tyto metody umožňují strojům lépe vykonávat svou práci, ať už se jedná o velký tovární stroj, klimatizaci nebo robot.AC motory jsou skvělé pro těžké pracovní místa a dlouhodobé použití, zatímco DC motory jsou lepší, když je potřeba rychlý a přesný pohyb.Použitím správné metody řízení rychlosti se ujišťujeme, že stroje fungují bezpečně, efektivně a přesně to, jak je potřebujeme.
O nás
ALLELCO LIMITED
Přečtěte si více
Rychlý dotaz
Zašlete prosím dotaz, budeme odpovědět okamžitě.
Často kladené otázky [FAQ]
1. Který motor je výkonnější, AC nebo DC?
Napájení závisí více na konstrukci motoru než na typ (AC nebo DC).Pro stejnou velikost a hodnocení napětí jsou však motory AC silnější, protože dokážou zvládnout vyšší zatížení a jsou postaveny pro nepřetržité, těžkopádné použití.Průmyslové motory AC, jako jsou třífázové indukční motory, jsou v továrnách běžné, protože mohou spolehlivě řídit velké stroje.Na druhé straně DC Motors nabízejí přesnější rychlost a ovládání točivého momentu, ale obvykle se používají v menších, specializovanějších aplikacích, jako je robotika, kde je jemno vyladěný pohyb důležitější než surová energie.
2. Který motor má vysoké otáčky, AC nebo DC?
DC motory obvykle dosahují vyšších RPM (revoluce za minutu) než střídavé motory, zejména malé permanentní magnet nebo bezkartáčové motory DC.Je to proto, že motory DC se nespoléhají na frekvenci elektrického vedení a mohou se točit rychleji pouze zvýšením napětí.Rychlost střídavého motoru je však vázána na vstupní frekvenci a počet pólů, takže je omezenější, pokud se nepoužívají pokročilé VFD.Motory DC se často používají tam, kde je potřeba vysokorychlostní výkon, například v elektrických nářadích, dronech nebo zdravotnických prostředcích.
3. vydrží DC motory déle než AC Motors?
Ne vždy.AC Motors vydrží déle v těžkých prostředích.Je to proto, že většina motorů střídavého proudu, zejména typy indukce, má méně pohyblivých částí a žádné kartáče, což znamená méně opotřebení v průběhu času.Kartáčované DC motory se opotřebovávají rychleji kvůli tření mezi kartáči a komutátorem.Beztáčkové DC motory (BLDC) však mají dlouhou životnost podobnou AC Motors a jsou velmi spolehlivé v zařízeních s nízkým výkonem nebo přesností.Záleží tedy na typu motoru DC a na tom, jak se používá.
4. Jaké jsou nevýhody motorů AC a DC?
AC motory mohou být obtížnější ovládat, protože změna jejich rychlosti vyžaduje složitá zařízení, jako jsou VFD.Nereagují také tak rychle na kontrolu signálů, což je činí méně ideálními pro úkoly, které vyžadují rychlé změny rychlosti.DC motory, zejména kartáčované, vyžadují větší údržbu kvůli opotřebení štětce.Mohou být také méně efektivní při vysokých úrovních výkonu a potřebují elektronické regulátory, jako jsou obvody PWM, pro kontrolu rychlosti.Kromě toho často nemohou zvládnout velká zatížení i střídavé motory, aniž by se staly objemným nebo přehřátím.
5. Co lze použít pro kontrolu rychlosti s motory AC i DC?
U AC Motors se variabilní frekvenční jednotky (VFD) používají ke změně rychlosti úpravou frekvence a napětí napájení.U DC Motors je modulace šířky pulsu (PWM) nejběžnější metodou, kde je rychlost upravena rychlým přepínáním napětí a vypínáním pro kontrolu dodávání energie.V obou případech lze přidat kontrolní systémy s uzavřenou smyčkou pomocí senzorů pro monitorování rychlosti motoru a jeho automaticky, což nabízí konzistentní a přesný provoz napříč různými zatíženími.

Vše o TMS320DM642AGNZ6 na jednom místě
na 2025/05/21

XCS20-3TQ144I Průvodce FPGA: Funkce, aplikace, alternativy a datový list
na 2025/05/20
Populární příspěvky
-

Komplexní instrukční sada Počítače: Jak změnily výpočetní techniku?
na 8000/04/18 147757
-

USB-C pinout a funkce
na 2000/04/18 111934
-
Použití primitiv simulace Xilinx Unified: Komplexní průvodce designem a simulací FPGA
na 1600/04/18 111349
-

Napájecí napětí v elektronice: Význam VCC, VDD, VEE, VSS a GND
na 0400/04/18 83719
-

Průvodce konektorem RJ45: Pinout, zapojení, typy kabelů a použití
na 1970/01/1 79508
-

Konečný průvodce barevnými kódy drátu v moderních elektrických systémech
Způsob, jakým naše elektrické systémy používají barvy, není jen pro vzhled.Každá barva drátu nyní označuje specifickou funkci, což usnadňuje správnou identifikaci a zpracování elektrických komponen...na 1970/01/1 66899
-

Kvalita (Q) Faktor: Rovnice a aplikace
Faktor kvality, neboli „Q“, je důležitý při kontrole toho, jak dobře induktory a rezonátory pracují v elektronických systémech, které používají rádiové frekvence (RF).„Q“ měří, jak dobře obvod mini...na 1970/01/1 63010
-

Průvodce čištění ventilu: funkce, příznaky, testování a náhrada za optimální výkon motoru
Vyčistit ventil je klíčovou součástí systému automobilu, který pomáhá udržovat vzduch čistý správou palivových párů, než mohou uniknout do atmosféry.To nejen pomáhá životnímu prostředí snížením zne...na 1970/01/1 63008
-

Dosažení maximálního výkonu s maximální větou přenosu energie
Maximální věta o přenosu výkonu vysvětluje, jak energie ze zdroje, jako je baterie nebo generátor, proudí do připojeného zatížení.Ukazuje přesnou podmínku, kdy zatížení přijímá nejvíce energie.Tent...na 1970/01/1 54081
-

Specifikace a kompatibilita baterie A23
Baterie A23 je malá baterie ve tvaru válce s vysokým napětím.Také se nazývá 23A, 23AE nebo MN21, běží při 12 voltech a mnohem vyšší než AA nebo AAA baterie.Díky jeho speciálnímu designu je...na 1970/01/1 52120
Horké číslo dílu
-

VOD217T
Vishay Semiconductor Opto Division
OPTOISOLATOR 4KV 2CH TRANS 8SOIC
594D107X9016C2T
Vishay Sprague
CAP TANT 100UF 10% 16V 2812
C1608JB1E685K080AC
TDK Corporation
CAP CER 6.8UF 25V JB 0603
MAX14753EUE+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SP4TX2 130OHM 16TSSOP
LMV7291MG
Texas Instruments
IC COMPARATOR 1 GEN PUR SC70-5
2SK4087LS-1E
onsemi
MOSFET N-CH 600V 9.2A TO220F-3FS
SN89019B0RSLR
Texas Instruments
PROTOTYPE
AT32UC3B164-Z1UT
Microchip Technology
IC MCU 32BIT 64KB FLASH 48QFN
LTC1821-1BCGW#TRPBF
Analog Devices Inc.
IC DAC 16BIT V-OUT 36SSOP
TL084CPT
STMicroelectronics
IC OPAMP JFET 4 CIRCUIT 14TSSOP
C1608X7S0J685K080AC
TDK Corporation
CAP CER 6.8UF 6.3V X7S 0603
08055C823K4T2A
KYOCERA AVX
CAP CER 0.082UF 50V X7R 0805
RT1206BRD073K3L
YAGEO
RES SMD 3.3K OHM 0.1% 1/4W 1206
S-13A1A12-E6T1U3
ABLIC Inc.
IC REG LINEAR 1.2V 1A 6HSOP
MAX8958EWW+T
Analog Devices Inc./Maxim Integrated
PMIC FOR SMART PHONE APPLICATION
MAX3386EIPWR
Texas Instruments
IC TRANSCEIVER FULL 3/2 20TSSOP
TLC7733IPWRG4
Texas Instruments
IC SUPERVISOR 1 CHANNEL 8TSSOP
INA2141PA
Burr Brown
IC INST AMP 2 CIRCUIT 16DIP -

UPC29M12T-E1-AZ
Renesas Electronics America Inc
IC REG LINEAR FIXED LDO REG
MCD224-22IO1
IXYS
MOD THYRISTOR/DIODE 2200V Y1-CU
VC060305A150RP
KYOCERA AVX
VARISTOR 8.5V 30A 0603
P1168.333NLT
Pulse Electronics
FIXED IND 33UH 2.2A 94 MOHM SMD
S-8521E15MC-BLAT2G
ABLIC Inc.
IC REG CTRLR BUCK SOT23-5
MAX3272AEGP-T
Analog Devices Inc./Maxim Integrated
LOW-POWER LIMITING AMPLIFIER
UCC2946PW
Texas Instruments
IC SUPERVISOR 1 CHANNEL 8TSSOP
MMO140-12IO7
IXYS
MODULE AC CONTROL 1200V ECO-PAC1
MMSZ5262B
Good-Ark Semiconductor
DIODE, ZENER, 0.5W, 51V,SOD-123
SP3087EEN-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 1/1 8SOIC
LM358WDT
Rohm Semiconductor
IC OPAMP GP 2 CIRCUIT 8SO
MRF177
MACOM Technology Solutions
FET RF 2CH 65V 400MHZ 744A-01
744765110A
Würth Elektronik
FIXED IND 10NH 480MA 195MOHM SMD
CP2103-GMR
Silicon Labs
IC CTRLR BRIDGE USB-UART 28MLP
AOZ1320CI-05
Alpha & Omega Semiconductor Inc.
IC PWR SWITCH P-CHAN 1:1 SOT23-6
C1005X8R1H681K050BA
TDK Corporation
CAP CER 680PF 50V X8R 0402
SN74ABT162244DGGR
Texas Instruments
IC BUF NON-INVERT 5.5V 48TSSOP
TNPW060341K7BEEN
Vishay Dale
RES 41.7K OHM 0.1% 1/10W 0603 -

GRM155R61E105KE11D
Murata Electronics
CAP CER 1UF 25V X5R 0402
CL31C151JIFNNNE
Samsung Electro-Mechanics
CAP CER 150PF 1KV C0G/NP0 1206
GRM188R61A105KA61J
Murata Electronics
CAP CER 1UF 10V X5R 0603
ADL5501AKSZ-R7
Analog Devices Inc.
IC RF DETECT 50MHZ-6GHZ SC70-6
GRM188R61A475KAAJD
Murata Electronics
CAP CER 4.7UF 10V X5R 0603
APT38F80B2
Microchip Technology
MOSFET N-CH 800V 41A T-MAX
MOC8020
onsemi
OPTOISO 5.3KV DARLINGTON 6-DIP
1808AA100KAT1A
KYOCERA AVX
CAP CER 10PF 1KV C0G/NP0 1808
LFB2H2G45SG7A204
Murata Electronics
2450.0 MHZ MULTI LAYER CHIP
LK160847NM-T
Taiyo Yuden
FIXED IND 47NH 150MA 200MOHM SMD
GRM0335C1E220JA01D
Murata Electronics
CAP CER 22PF 25V C0G/NP0 0201
SN74LVC138APWR
Texas Instruments
IC DECODER/DEMUX 1X3:8 16TSSOP
32006-D22
Bussmann (Eaton)
MALE O/PUT TANG VERSION DCR 3749
JFW100A1
ABB Power Electronics Inc.
DC DC CONVERTER 5V 100W
CS51414GD8G
onsemi
IC REG BUCK ADJ 1.5A 8SOIC
P6SMB15CAT3
onsemi
TVS DIODE 12.8VWM 21.2VC SMB
NFA18SL407V1A45L
Murata Electronics
FILTER LC 400MHZ SMD
TIP41BG
onsemi
TRANS NPN 80V 6A TO220